Cyberstakes CTF 2020: Assembly Voyageur
Category: Misc
Points: 300
Challenge
It’s time for an adventure. Begin your travels here
Hints
- A good traveler knows that you should bring the right tools for the job:
sudo apt install gcc gcc-aarch64-linux-gnu gcc-mips-linux-gnu gcc-powerpc-linux-gnu gdb-multiarch qemu-user-static - Some assemblers support pseudo-instructions that aren’t defined in the Instruction Set. Other assemblers may not support those pseudo-instructions, but do support the underlying instruction.
Observations
The webpage for this challenge contains five textareas, each holding a snippet of assembly code for a different architecture.
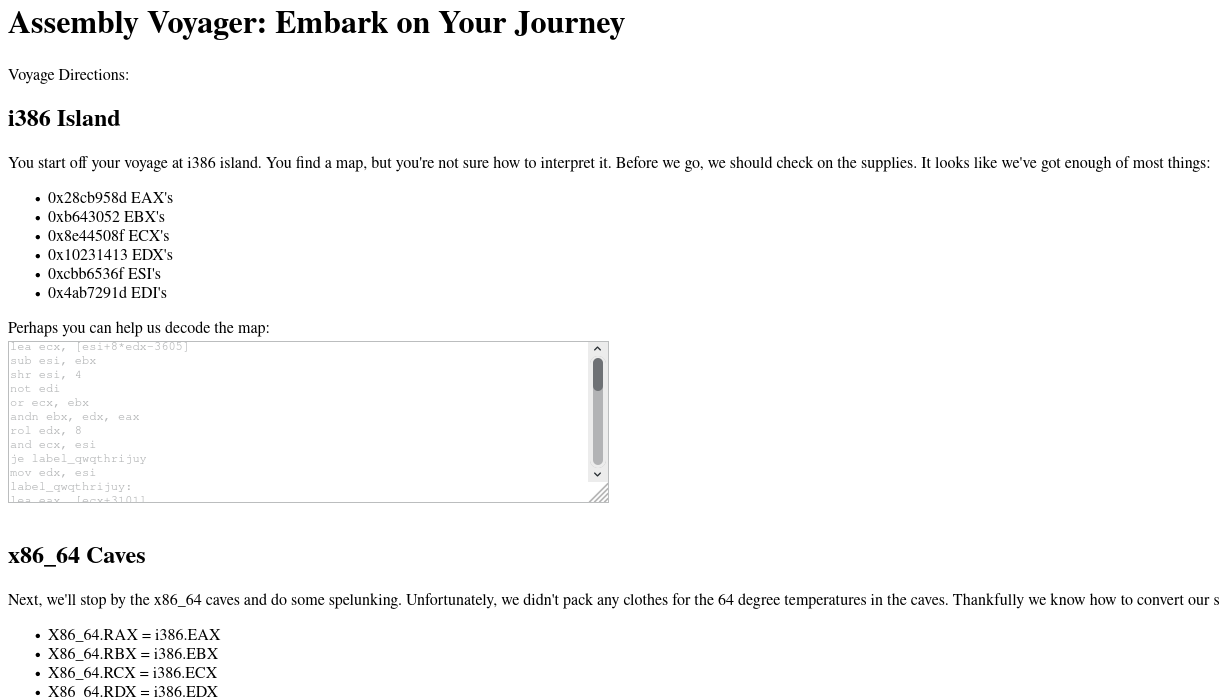
Above each snippet is a set of initial conditions for the register state and a description that indicates the architecture type. The register values that are output by executing one set of assembly are provided as inputs into the next one. If we enter an incorrect solution into the challenge, the initial register values and assembly code are regenerated.
Solution
The ideal solution to this challenge would have been to use Keystone to compile the individual assembly and then feed its output into Unicorn to emulate it and get a final result. Unfortunately, even after regenerating the challenge multiple times, we run into issues. Keystone would either fail to assemble certain instructions or Unicorn would fail while emulating the code.
This is not surprising given how unusual some of the assembly looks. We will have to assemble these programs somewhat manually. For the i386 and amd64 code, we can just use NASM:
nasm -f elf32 i386.asm -o i386.o
gcc i386.o -m32 -o i386.bin -static
For the other non-Intel code, we need to use the GCC toolchain for that specific architecture.
These can be installed with sudo apt install gcc-{arch}-linux-gnu just as the provided hint tells us.
The ARM assembly builds with no issues:
aarch64-linux-gnu-as aarch64.asm -o aarch64.o
aarch64-linux-gnu-gcc aarch64.o -o aarch64.bin -static
We do encounter some errors attempting to assemble the MIPS code. The assembler complains about register names not being valid. There are multiple names that can be used to refer to certain registers in MIPS assembly and apparently this assembler does not recognize all of them. To solve this issue without modifying the actual code, we can add define statments at the top to provide the alternate register names:
#define zero $0
#define AT $1
#define v0 $2
#define v1 $3
#define a0 $4
#define a1 $5
#define a2 $6
#define a3 $7
#define s0 $16
#define s1 $17
#define s2 $18
#define s3 $19
#define s4 $20
#define s5 $21
#define s6 $22
#define s7 $23
#define t8 $24
#define t9 $25
#define jp $25
#define k0 $26
#define k1 $27
#define gp $28
#define sp $29
#define fp $30
#define s8 $30
#define ra $31
We run into this same issue again with the PPC assembly.
With PPC however, the assembler supports an extra command line argument -mregnames which handles this for us:
powerpc-linux-gnu-as ppc.asm -mregnames -o ppc.o
powerpc-linux-gnu-gcc ppc.o -o ppc.bin -static
To automate this process, we can collect the above commands into a Makefile.
all: i368 amd64 aarch64 mips ppc
i386: i386.asm
nasm -f elf32 i386.asm -o i386.o
gcc i386.o -m32 -o i386.bin -static
amd64: amd64.asm
nasm -f elf64 amd64.asm -o amd64.o
gcc amd64.o -o amd64.bin -static
aarch64: aarch64.asm
aarch64-linux-gnu-as aarch64.asm -o aarch64.o
aarch64-linux-gnu-gcc aarch64.o -o aarch64.bin -static
mips: mips.S
mips-linux-gnu-gcc mips.S -o mips.bin -static
ppc: ppc.asm
powerpc-linux-gnu-as ppc.asm -mregnames -o ppc.o
powerpc-linux-gnu-gcc ppc.o -o ppc.bin -static
clean:
rm -rf *.o *.bin
We can also write a parser that will extract each snippet of assembly and write it to the source files.
from bs4 import BeautifulSoup
with open("AssemblyVoyageur.html", "r") as f:
page = f.read()
soup = BeautifulSoup(page, 'html.parser')
print(soup.prettify())
regstate = soup.body.find_all("ul")[0]
snippets = soup.body.find_all("textarea")
i386 = snippets[0]
amd64 = snippets[1]
aarch64 = snippets[2]
mips = snippets[3]
ppc = snippets[4]
# Create i386
with open("i386.asm", "w") as f:
f.write("BITS 32\n")
f.write("SECTION .text\n")
f.write("global main\n")
f.write("main:\n")
# Add the initial register state
for reg in regstate.find_all("li"):
v, r = reg.contents[0].split()
r = r[:-2].lower()
f.write("mov " + r + ", " + v + "\n")
for line in i386.contents:
f.write(line)
f.write("db 0xcc")
# Create amd64
with open("amd64.asm", "w") as f:
f.write("BITS 64\n")
f.write("SECTION .text\n")
f.write("global main\n")
f.write("main:\n")
for line in amd64.contents:
f.write(line)
f.write("db 0xcc")
# Create aarch64
with open("aarch64.asm", "w") as f:
f.write(".global main\n")
f.write(".text\n")
f.write("main:\n")
for line in aarch64.contents:
f.write(line)
# Create mips
with open("mips.S", "w") as f:
f.write("#define zero $0\n")
f.write("#define AT $1\n")
f.write("#define v0 $2\n")
f.write("#define v1 $3\n")
f.write("#define a0 $4\n")
f.write("#define a1 $5\n")
f.write("#define a2 $6\n")
f.write("#define a3 $7\n")
f.write("#define s0 $16\n")
f.write("#define s1 $17\n")
f.write("#define s2 $18\n")
f.write("#define s3 $19\n")
f.write("#define s4 $20\n")
f.write("#define s5 $21\n")
f.write("#define s6 $22\n")
f.write("#define s7 $23\n")
f.write("#define t8 $24\n")
f.write("#define t9 $25\n")
f.write("#define jp $25\n")
f.write("#define k0 $26\n")
f.write("#define k1 $27\n")
f.write("#define gp $28\n")
f.write("#define sp $29\n")
f.write("#define fp $30\n")
f.write("#define s8 $30\n")
f.write("#define ra $31\n")
f.write(".global main\n")
f.write(".text\n")
f.write("main:\n")
for line in mips.contents:
f.write(line)
# Create ppc
with open("ppc.asm", "w") as f:
f.write(".global main\n")
f.write(".text\n")
f.write("main:\n")
for line in ppc.contents:
f.write(line)
The full solution code can be found here.
We can now easily create executables for each source file. The last step is to run each program with the correct initial register values. Instead of attempting to manually add new instructions to the beginning of each file, we can run each program with GDB and set the register values ourselves.
To debug the non-Intel programs, we can use QEMU’s user-space emulation mode along with gdb-multiarch.
We compiled each program with the -static option, which means all of our programs are statically linked and should have no issues running in QEMU.
Each program can be debugged with the following:
qemu-{arch}-static -g 12345 ./{arch}.bin
gdb-multiarch ./{arch}.bin
The commands to enter in GDB, with the register values changed manually, are as follows:
// i386.bin
start
continue
info registers eax ebx ecx edx esi edi
// amd64.bin
start
set $rax = 0
set $rbx = 0xf
set $rcx = 0x18acfc96
set $rdx = 0xc052231
set $rsi = 0xc83cd
set $rdi = 0x91188000
continue
info registers rax rbx rcx rdx rsi rdi
// aarch64.bin
set architecture aarch64
set endian little
target remote localhost:12345
break main
continue
set $x1 = 0x16f5
set $x2 = 0x2dea
set $x3 = 0x15
set $x4 = 0
set $x5 = 0x16f500000
set $x6 = 0xb7a
continue
info registers x1 x2 x3 x4 x5 x6
// mips.bin
set architecture mips
set endian big
target remote localhost:12345
break main
continue
set $s1 = 0x9fe46ff7f1901bff & 0xffffffff
set $s2 = 0x2c0490ce5cce1c06 & 0xffffffff
set $s3 = 0x6000000000000000 & 0xffffffff
set $s4 = 0x6 & 0xffffffff
set $s5 = 0x34a5ffffea2b7f & 0xffffffff
set $s6 = 0x1b90080e6fe400 & 0xffffffff
continue
info registers s1 s2 s3 s4 s5 s6
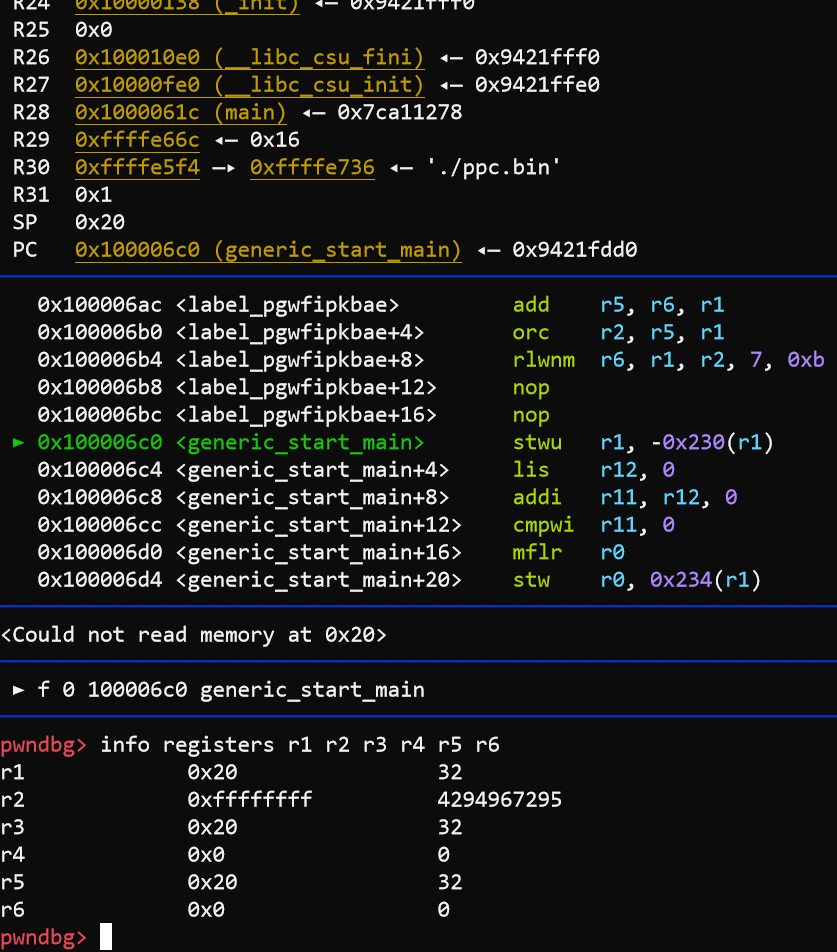
// ppc.bin
set architecture powerpc:common
set endian big
target remote localhost:12345
break main
continue
set $r1 = 0
set $r2 = 0xffea29fe
set $r3 = 0
set $r4 = 0x4b800000
set $r5 = 0
set $r6 = 0
continue
info registers r1 r2 r3 r4 r5 r6
Running the PPC program gives us the final register values we need.
We can compute the final result from these registers and get the flag.
